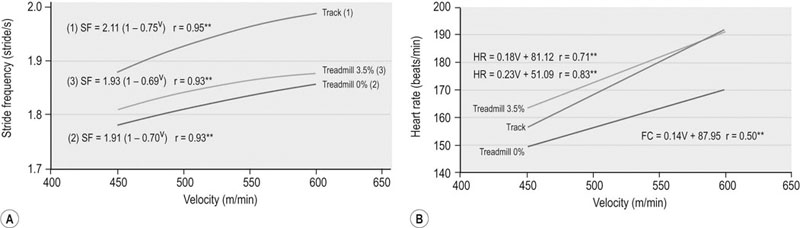
The horse is a super athlete who often suffers from injuries of its locomotor apparatus because of human management errors (nutrition, training, shoeing, and breeding), bad environmental conditions (tracks, weather) and/or an unfavorable constitution (limb conformation, genetics). In stables specialized in gallop racing, about 53% to 68% of the wastage in racehorses is due to lamenesses.1,2 This economic disaster justifies the great effort now being put into equine locomotion research, including clinical applications and techniques for preventing lameness. Economic constraints also favor the development of early performance evaluation in order to improve the training and selection of young horses. This chapter presents a review on equine locomotion and the applications of gait analysis. Current knowledge concerning the equine locomotion variables in various sporting disciplines and the influence of training are discussed. Finally, a survey of the practical applications of equine gait analysis will be presented. The body of the horse is composed of a set of rigid segments articulated one to another. Consequently, the body of the horse follows exactly the same mechanical laws as a series of inanimate objects (Fig. 10.1). However, these laws need to be applied carefully because the mechanical equations which determine the motions of a set of articulated body segments are much more complicated than those that determine the motion of a single inanimate object like a bullet. There are two complimentary methods for studying the body in motion: kinetics and kinematics. • Kinetics or dynamics studies the cause of the motion, which can be explained by the force applied to the body, its mass distribution and its dimensions. Kinetics is concerned with forces, energy, and work which are also in relation to kinematic variables such as acceleration and velocity. Acceleration can be directly measured by specific sensors. However, acceleration is defined as an instantaneous change of velocity (i.e. the derivative of the velocity against time). Consequently, it can be deduced from velocity data obtained in kinematics by the displacement measurements. • Kinematics studies the changes in the position of the body segments in space during a specified time. The motions are described quantitatively by linear and angular variables which relate time, displacement, velocity and acceleration. No reference is made in kinematics to the cause of motion. The kinematic approach is more commonly employed, probably because it is easier to measure and visualize some displacements or velocities than to measure and imagine some forces, moments or accelerations applied to the body. The use of chronophotography was first developed by Muybridge and Marey for animal locomotion analysis. Currently new technology, using high-speed cameras (16 mm–500 images/s), is used for example to film the locomotion of Standardbred horses from a camera car under track conditions.3 Markers are used which are composed of small white spots or half spheres glued onto the skin over standard anatomical locations (Fig. 10.2A).4,5 They are intended to indicate the approximate instantaneous center of rotation of the joint.6,7 However, the skin displacements over the skeleton during the locomotion generate some artifacts especially in the proximal joints.8,9 The processing of the film for collecting the joint marker coordinates is undertaken using a computer. This is a relatively time-consuming task, but many time and linear characteristics of the strides can be obtained for describing individual gait variations. With the improvement of the video camera sensors (CCD) many professional high-speed video cameras (100–2000 images/s) and home video cameras (PAL or NTSC Standard: 25–30 images/s or 50–60 frames/s) can be employed for locomotion analysis. The video signal can be treated by a video interface in order to digitize the images which are then analyzed by the appropriate software to collect semi-automatically or automatically the marker coordinates in space and time.10 A more sophisticated motion analysis system uses active markers which consist of photodiodes (modified Cartesian Optoelectronic Dynamic Anthropometer CODA-3). The advantage of this system is its good resolution (0.2–2.6 mm) in three dimensions, high recording frequency (300 Hz) and the automatic tracking possibilities of the active markers.11 The main disadvantage is that the subject needs to be equipped with many photodiodes connected to wires. Most equine locomotion studies show two-dimensional motion analysis, but some systems including four or more video cameras make it possible to reconstruct the motion in three dimensions and to analyze the limb motions of both sides.12,13 One limit of these sophisticated gait analysis systems is the restricted field of view. This is only about five meters which corresponds to several walking strides or one trotting stride. In order to analyze sporting exercise in a wider field (up to 30 m), a camera panning technique has been developed and has been used to study gait parameters in dressage and jumping horses.10,14,15 This technique can be used for the kinematic analysis of athletic locomotion under real exercise conditions (Fig. 10.2B). After collecting the coordinates of the markers, the linear and angular velocities can be obtained by computing the first derivative of the trajectories and angles with respect to time. If the filming image frequency is high, the second order derivative of a trajectory or angular variations with respect to time using appropriate smoothing and filtering techniques provides linear and angular acceleration data. The advantage of kinematics methods is that you can obtain all the kinematic parameters (displacement, velocity, and linear acceleration, angle of rotation, angular velocity and angular acceleration) of the identified segments. If the center of gravity and the moment of inertia of each segment can be determined by measuring their mass distribution and their dimensions, it is possible to calculate the kinetic parameters (forces and kinetic moment), which determine the motion of each segment, from the kinematic data. Finally, the kinetic energy can be estimated for each segment and for the whole body in motion. Several methods have been described to estimate the location of center of gravity and the moment of inertia of each segment (Fig. 10.2C).15,16,17 Another approach to the study of the biomechanics of locomotion is to measure either the external forces applied to the body or the accelerations of the center of gravity of the body segments. Marey (1873) was the first author to use a pressure sensor attached to the ground surface of a horse shoe and accelerometers attached to the limbs to measure the hoof ground contact durations at the various gaits.18 All the sensors measured forces using pneumatic principles. The variations in pressure generated by the various transducers were recorded by tracing curves with a portable pneumotachograph. Modern sensor technology is much improved and is capable of making accurate measurements over a large range of conditions. However, the measurement principles have remained identical. The external forces are measured using electronic force sensors which record the ground reaction forces when the hooves are in contact with the ground. The sensors can be installed either on the ground in a force plate device or in a shoe attached to the hoof.19 The force plates can provide the force amplitude and orientation (vector coordinates in three dimensions, Fig. 10.3), the coordinates of the point of application of the force and the moment value at this point.20 The accuracy of this type of device is usually good but the sensitive surface is rather small (about 0.5 m2) and a visual control of the hoof trajectory is required. In human biomechanics, the treadmill has been used to measure vertical ground reaction forces in standardized exercise conditions. In equine biomechanics, vertical ground reaction forces were measured for all four limbs simultaneously with the treadmill integrated force measuring system 21 (Fig. 10.4). After collecting reference data on warmblood horses walking and trotting 22, it has been used for dressage gait analysis and lameness evaluation in standardized conditions of speed, hardiness of the ground, environment.23, 24 In order to measure the ground reaction forces during various exercises, several authors have developed hoof force shoes including one or several force sensors (Fig. 10.5).18,25–29 Depending on their design, these devices can give between one and three components of the ground reaction forces and the point of application. They are generally less accurate than the force plate and their main disadvantage is the additional weight and thickness of the special shoe. Recently, another indirect ambulatory technique of ground reaction force evaluation was proposed using strain gauges glued onto the hoof wall. After the training of the appropriate artificial neural networks, the ground reaction forces can be estimated from the hoof wall deformations.30 A sudden change in velocity can give a high acceleration or deceleration (decrease of acceleration) even if the displacement is small. The acceleration vector is proportional to the resultant force applied to the body’s center of gravity and its measurement provides a convenient way to study the kinetics of a body in motion. In order to analyze horse locomotion, the accelerometer should be placed as near as possible to the body center of gravity. The caudal part of the sternum between the right and left pectoralis ascendens muscles at the level of the girth provides a good compromise between transducer stability and closeness to the horse’s center of gravity (about 65 cm dorsocaudally at the gallop). The acceleration signal is transmitted to a PC or recorded with a small data logger placed in the saddle pad (Fig. 10.6A). The first application of this gait analysis system (Equimetrix TM) was used for evaluation of harnessed trotters and then for sport and racing horses.31 The acceleration signal, such as dorsoventral acceleration at the trot, could be treated by signal analysis procedures in order to extract the dynamic and temporal stride variables such as stride frequency, regularity, symmetry and power in the three axes (Fig. 10.6B). Calculating the double integral of the linear acceleration makes it possible to find kinematic variables (linear or angular displacement) such as the instantaneous displacement of the saddle in space.32 Several examples of gait variables calculated from acceleration data will be presented in the following paragraphs. Acceleration measurements could also be employed for analyzing the energy characteristics of shocks and vibrations which are transient in the hoof.33–35 An accelerometer could be fixed on the hoof wall in order to measure the maximal deceleration of the hoof impact on the ground and the vibration frequency (Fig. 10.7). The influence of horse shoes and ground surface characteristics could be studied using this method. Under laboratory conditions it is possible to study the locomotion of horses running on an experimental track or on a treadmill. The latter provides an excellent means of controlling the regularity of the gaits because the velocity and slope of the treadmill belt are entirely fixed by the operator. In order to analyze the gait of a horse without stress, some pre-experimental exercise sessions are required to accustom it to this unusual exercise condition.36 The horse adapts rapidly at the trot, and stride measurements can be undertaken beginning at the third session. For the walk, many stride parameters are not stable even after the 9th training session. Within a session, a minimum of five minutes of walking or trotting is required to reach a steady state of locomotion. Many fundamental locomotion studies have been performed on commercially available high speed treadmills, since the development of the first installation of this type of machine at the Swedish University of Agricultural Science in Uppsala.37 At the beginning of human treadmill use, it was suggested that locomotion on a treadmill would be exactly the same as on the ground.38 This hypothesis did not take into account the fact that the human body is not a rigid body system but an articulated set of segments. In horses, it was demonstrated experimentally that the stride parameters are modified in flat and inclined exercise at trot and canter.39 At the same speed, the stride frequency was lower on the treadmill and the stride length was longer than in over ground conditions (Fig. 10.8A). The exercise on a flat treadmill generated lower cardiac and blood lactate responses than exercise on the track at the same velocities.39,40 In trotters tested under two training tracks and treadmill conditions, there were no significant differences in locomotor and physiological variables between tracks but the treadmill had the same influence as in saddle horses.41 In order to reproduce approximately the same energetic exercise on a treadmill, it was found that a treadmill incline of 3.5% gives the same heart rate response as in over ground condition (Fig. 10.8B). The mechanical reasons for these differences are not entirely known today but some explanations have been suggested by the experimental and theoretical results. The treadmill belt is driven by the motor and it helps the horse limbs to go back (Fig. 10.9). The speed of the treadmill belt fluctuates in relationship to the hoof impact on the belt.30 The total kinetic energy of human runners filmed at the same speed on a flat track and treadmill was calculated using the kinematic data (all the body segments taken into account). It was found that the total kinetic energy was reduced by a factor of 10 on the treadmill compared to on the track.42 This difference was mainly explained by a reduction of the kinetic energy of each limb and arm segment, which moved with a lower amplitude around the total body center of gravity on the treadmill as compared to under track conditions. However, these results cannot be extrapolated to the horse because the measurements and calculations do not relate to quadrupedal locomotion. At a slow trot, a 6% inclination of the treadmill tends to increase the stride duration and significantly increases the stance duration of the forelimbs and hind limbs.43 Kinematic analysis has confirmed that the hind limbs generated higher propulsion work on the inclined, rather than flat, treadmill. The inclination of the treadmill did not change the stride length nor did it change the stance, swing and stride duration in a cantering Thoroughbred.44 Gait variety and complexity have always created difficulties when it is necessary to choose adequate terminology to describe the locomotor phenomenon. Some efforts have been made to define a standard terminology for use in describing equine locomotion.45–47 A gait can be defined as a complex and strictly coordinated rhythmic and automatic movement of the limbs and the entire body of the animal which result in the production of progressive movements. A two, three or four beat gait corresponds to the number of hoof impacts that can be heard during a stride of trot, canter and gallop, respectively. The sounds are related to the footfall sequence of the gait but small asynchrony cannot be detected audibly. To describe the footfall sequence of each gait, it is useful to name the four limbs: right forelimb (RF), left forelimb (LF), right hindlimb (RH) and left hindlimb (LH). Many methods have been proposed to describe more precisely in time and space the limb movements: drawings, chronophotograpies, stick bar (Fig. 10.10), phase and pie diagrams.18, 48–50 1. During a diagonal stance phase, for example at the trot, a hind limb and the contralateral forelimb are in contact with the ground at the same time. The left diagonal is composed of the left forelimb and right hindlimb; the right diagonal is composed of the right forelimb and left hindlimb. 2. During a lateral stance phase, for example at the pace, the hindlimb and forelimb of the same side are in contact with the ground at the same time. Main characteristics of the equine gaits are described in Table 10.1 Within each gait are continuous variations from slow speed with a collected gait to higher speed with an extended gait. Two types of gait can be distinguished by the symmetry of the limb movement sequence with respect to time and the median plane of the horse: Table 10.1 Several methods have been proposed to classify the gaits according to their temporal characteristics. The continuum of symmetric gaits was described by a diagram proposed by Hildebrand.51 The stance duration of the hindlimb was plotted against the lateral advanced placement. On the x-axis, the stance duration of the hindlimb indicates if the gait is walked (no suspension phase) or run (two suspension phases). On the y-axis, the lateral advanced placement quantifies the asynchrony or the phase lag of the lateral fore and hind limbs. The two beat gaits are up and down the diagram and the four beat gaits are in the middle part of the diagram. Another diagram has been proposed for illustrating the diagonal gaits by plotting the hind stance phase duration against the diagonal advanced placement.52 The walk is a four beat gait with a large overlap time between stance phases of the limbs. This is the slowest equine gait but probably one of the more complex because of overlap and lag phase variability. During lameness examination, the variability of stride regularity and symmetry measured at the walk was higher than at the trot.53 In dressage horses, the speed of the walk increases from the collected walk (1.37 m/s) to the extended walk (1.82 m/s) and simultaneously there is a small increase in stride frequency.54 The change in speed was primarily the result of lengthening of the stride by increasing the over-tracking distance. Even in horses trained for dressage, the regular four beat rhythm of the footfall was observed in only one of the six horses measured.
Biomechanics of locomotion in the athletic horse
Introduction
Locomotion analysis
Kinematic analysis
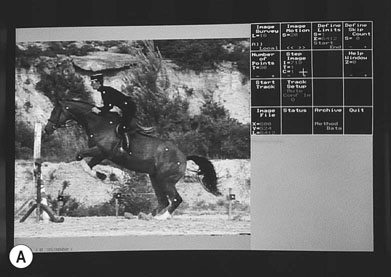
(A) One image extracted from the video film. It shows the horse and rider equiped with white anatomical markers. These markers are used to identify the location of each joint on each image.
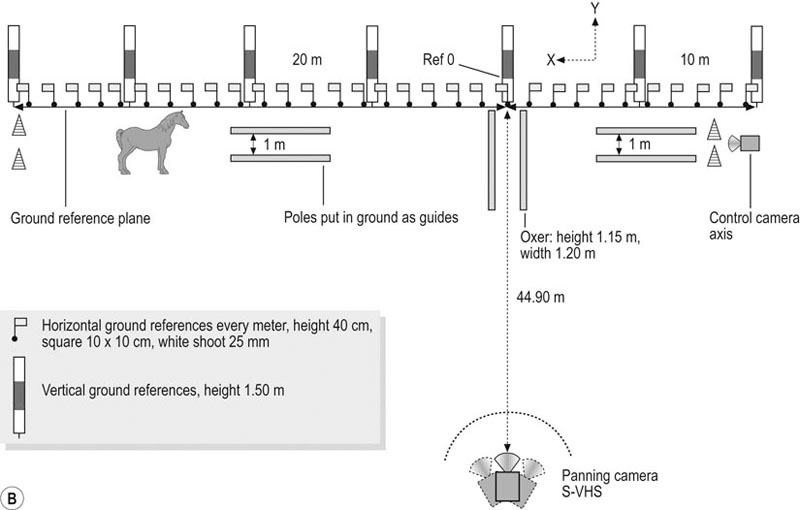
(B) Film recording procedure for a panning camera system. This method allowed filming and analyzing the motion on a large field (30 m), as in jumping exercise. A set of ground references were placed parallel to the horse trajectory.
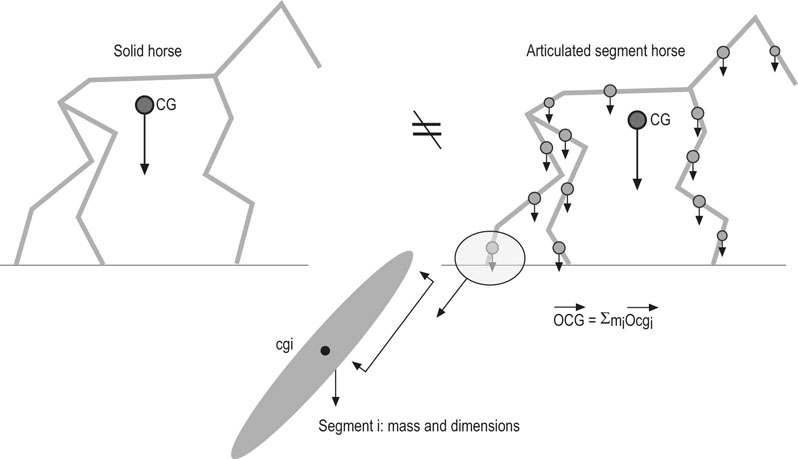
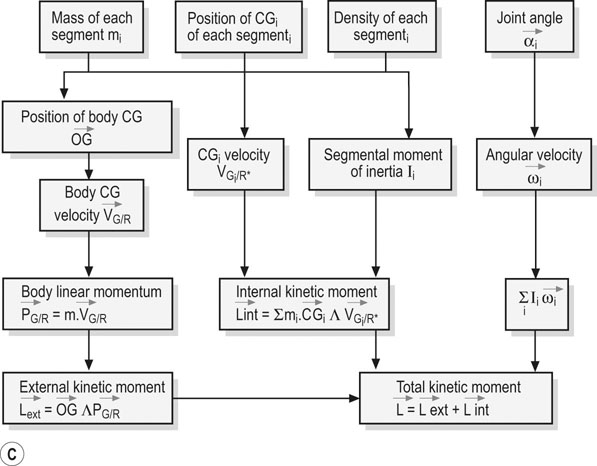
(C) Data analysis procedure to compute the center of gravity (CG) and total kinetic moment (L). After tracking the markers of each joint, the coordinates data were used to calculate the center of gravity (CGi) of each segments, the velocity (Vgi), the moment of inertia (Ii), the angles (αi), the angular velocity (ωi) and the external and internal kinetic moment.
Kinetic analysis
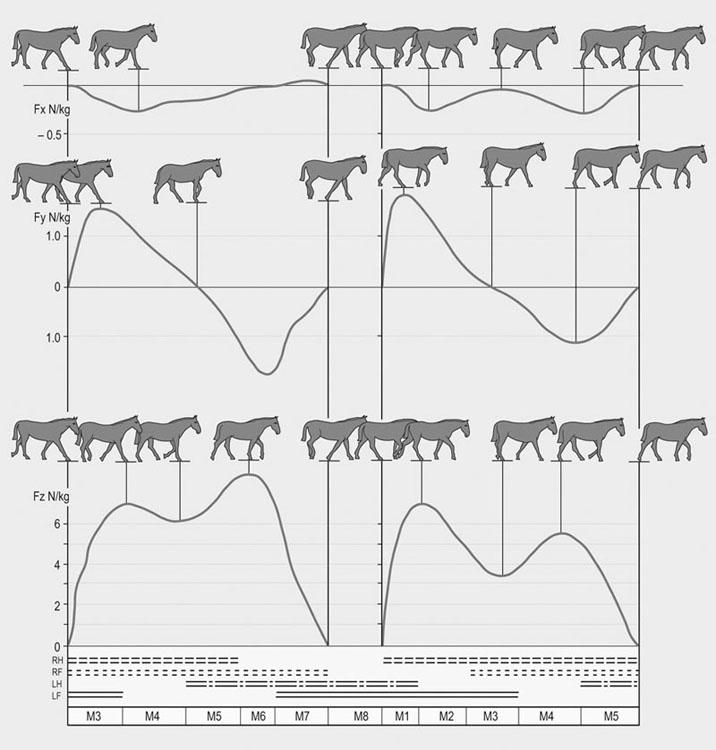
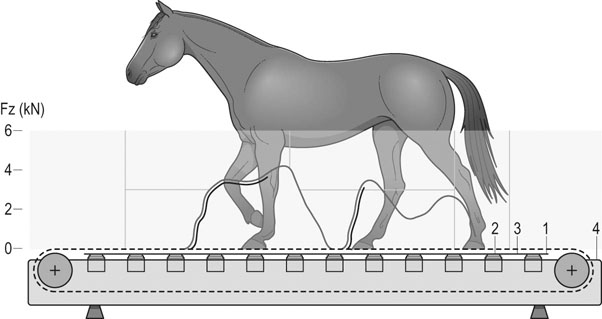
Ground reaction forces

Acceleration analysis
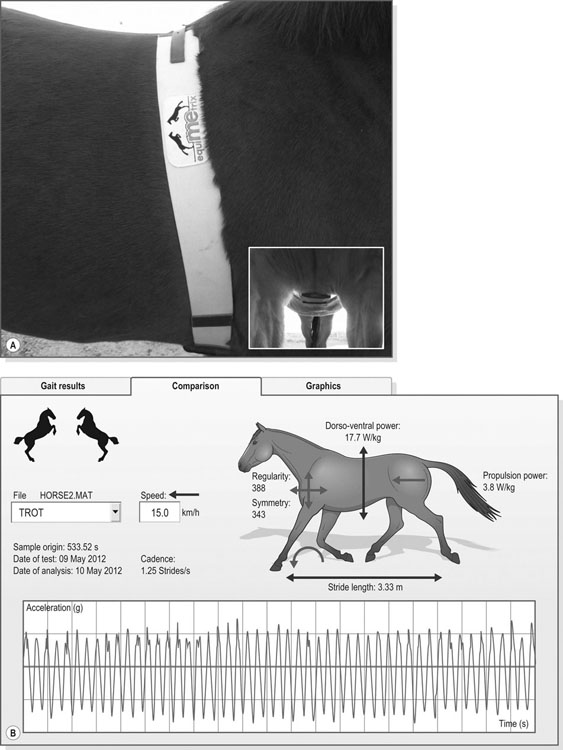
(A) Three dimensional accelerometers are fixed on the sternum by an elastic belt or the girth of the saddle. The accelerations are recorded continuously during the exercise. Then, the software calculates gait variables such as stride frequency, regularity, symmetry and power in the longitudinal, dorso-ventral and latero-medial axes.
(B) Example of gait analysis results calculated at the trot. The peaks correspond to the maximum loading of the diagonal. The valleys correspond to the suspension phases. The results can be compared to reference values of different breeds, age and ability.

Conditions of gait measurements: treadmill exercise vs. ground exercise
Response to exercise: velocity-related changes in gaits and stride characteristics
Gait terminology and definitions of stride characteristics
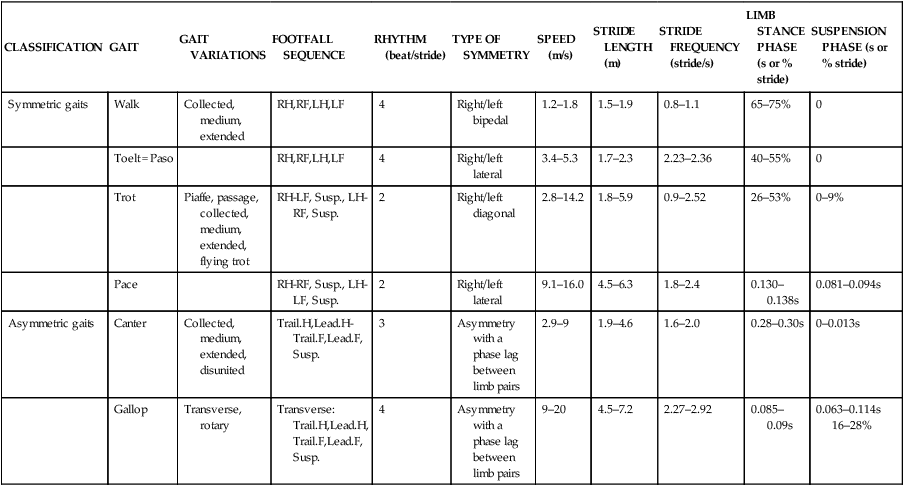
Variety of gaits
CLASSIFICATION
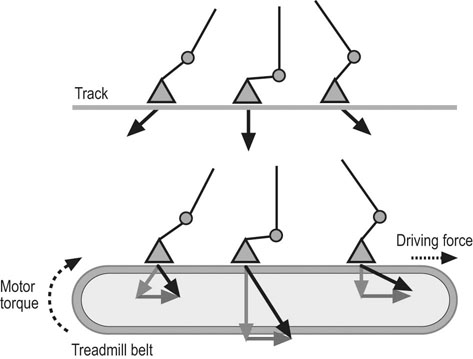
GAIT
GAIT VARIATIONS
FOOTFALL SEQUENCE
RHYTHM (beat/stride)
TYPE OF SYMMETRY
SPEED (m/s)
STRIDE LENGTH (m)
STRIDE FREQUENCY (stride/s)
LIMB STANCE PHASE (s or % stride)
SUSPENSION PHASE (s or % stride)
Symmetric gaits
Walk
Collected, medium, extended
RH,RF,LH,LF
4
Right/left bipedal
1.2–1.8
1.5–1.9
0.8–1.1
65–75%
0
Toelt = Paso
RH,RF,LH,LF
4
Right/left lateral
3.4–5.3
1.7–2.3
2.23–2.36
40–55%
0
Trot
Piaffe, passage, collected, medium, extended, flying trot
RH-LF, Susp., LH-RF, Susp.
2
Right/left diagonal
2.8–14.2
1.8–5.9
0.9–2.52
26–53%
0–9%
Pace
RH-RF, Susp., LH-LF, Susp.
2
Right/left lateral
9.1–16.0
4.5–6.3
1.8–2.4
0.130–0.138s
0.081–0.094s
Asymmetric gaits
Canter
Collected, medium, extended, disunited
Trail.H,Lead.H-
Trail.F,Lead.F, Susp.
3
Asymmetry with a phase lag between limb pairs
2.9–9
1.9–4.6
1.6–2.0
0.28–0.30s
0–0.013s
Gallop
Transverse, rotary
Transverse:
Trail.H,Lead.H, Trail.F,Lead.F, Susp.
4
Asymmetry with a phase lag between limb pairs
9–20
4.5–7.2
2.27–2.92
0.085–0.09s
0.063–0.114s
16–28%
Symmetric gaits
Walk



