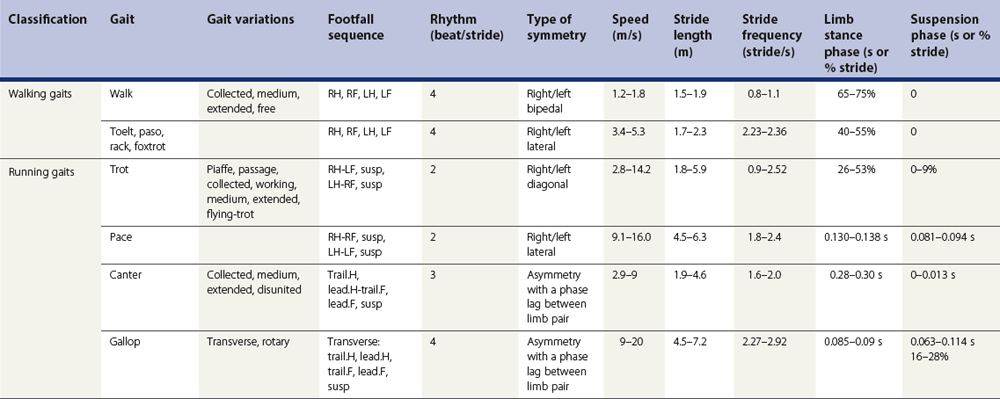
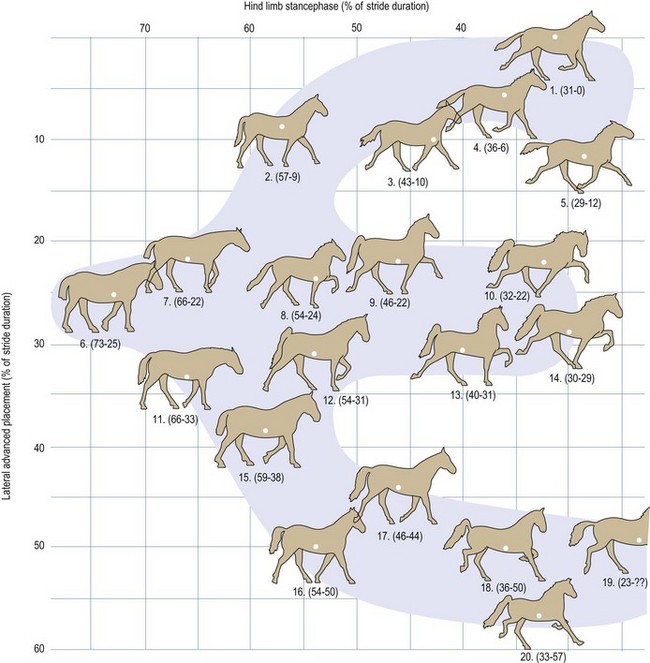
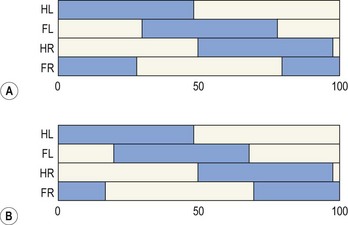
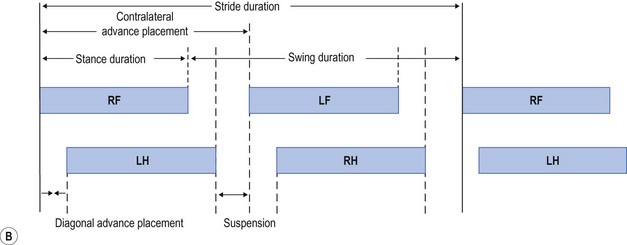
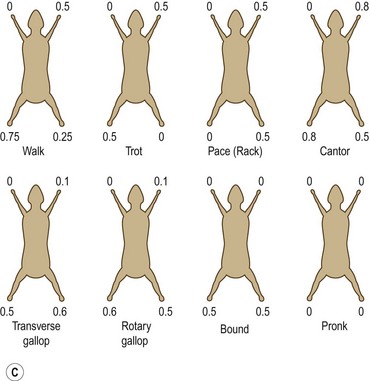
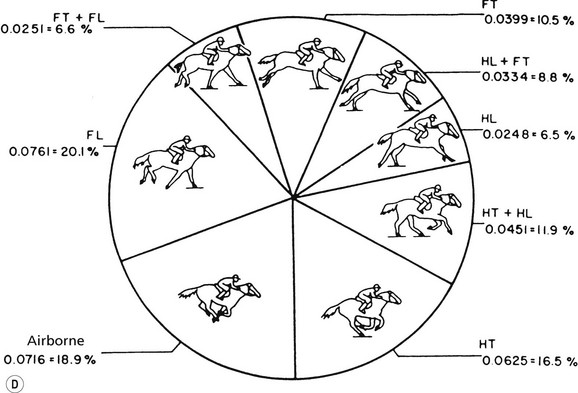
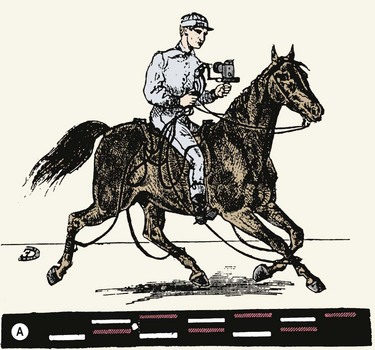
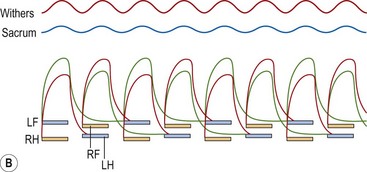
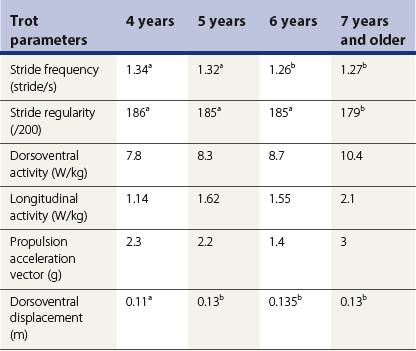
Chapter 5 The locomotor apparatus is a complex set of systems including muscle, bone segments and joints, which are controlled by the central nervous system to produce well-coordinated locomotion. Biomechanically, locomotion involves moving all the body and limb segments in rhythmic and automatic patterns, which define the various gaits. A great diversity exists in equine gait patterns because quadrupedal locomotion allows many combinations of inter-limb coordination. Furthermore, horse breeds have been genetically selected for different occupations: draft, riding, driving and meat production. Sport horses compete in a variety of sports, including pacing, trotting and galloping races, eventing, show jumping, dressage, endurance and western disciplines. Consequently, a large range of gaits and gait variations can be observed in horses, including the walk and its many variations, trot, pace, canter and gallop. These gaits can be analyzed and classified according to their linear, temporal and dynamic characteristics using the measuring techniques that have been described in Chapter 3. The variety and complexity of gaits have always created difficulties in defining a terminology that is, at the same time, broad enough and also sufficiently specific to describe the locomotor phenomenon. Some efforts have been made to define a standard terminology for describing equine locomotion (Leach et al., 1984a; Clayton, 1989; Leach, 1993) The gait terminology used in this book is defined in the glossary (p. xix). • symmetric gaits: walk, trot, running walk, rack, toelt, fox trot, paso, stepping pace • asymmetric gaits: canter, transverse and rotary gallop, half bound. Another type of gait classification distinguishes between stepping or walking gaits that have no period of suspension (there is always a contact with the ground) and running gaits that have one or more suspension phases in each stride (no foot in contact with the ground). The main characteristics of equine gaits are described in Table 5.1. Within each gait there exist continuous variations, from a collected type of gait with a slow speed, to an extended type of gait with a higher speed. Many types of illustrations have been proposed to describe the limb movements more precisely in time and space: drawings, chronophotographs, bar diagrams, phase diagrams and pie diagrams (Fig. 5.1). Some of the methods are only descriptive and show either temporal or linear characteristics of gaits: Fig 5.1 Methods for representing the footfall sequences and temporal characteristics of the gaits. (A) Drawings of the footfall sequence observed at the flying trot. (B) Gait and bar diagram of the trot. The bars represent the stance phase duration of each limb. (C) Drawings of the relative phases between the limbs in various quadrupedal gaits. (D) Pie gait diagram of the gallop in Quarter Horses showing the footfall sequence and the durations of the suspension phase, stance phases and overlaps expressed in seconds and as a percentage of stride duration. The sequence rotates counterclockwise. (A) Reproduced from Barroil (1887). (C) From Alexander, R. McN. The gait of bipedal and quadrupedal animals. Int. J. Robotics Res. 3, 49–59, Copyright ©1984, reprinted by permission of SAGE. (D) Reproduced from Deuel & Lawrence (1987). • Drawings of the footfall sequence (Barroil, 1887) (Fig. 5.1A). • Gait or bar diagrams and hoof imprints which shows tracks and linear distances (Lenoble du Teil, 1893) (Fig. 5.1B). Gait and bar diagrams can also describe temporal footfall sequence (Marey, 1873) (see Fig. 5.4B). • Pie gait diagram showing the footfall sequence and relative durations of the suspension phase, stance phases and overlaps (Deuel & Lawrence, 1984) (Fig. 5.1D). Two other methods represent and classify the gaits in a more functional way using phase lag or advance between the footfalls: • The continuum of symmetric gaits was described by a diagram proposed by Hildebrand (1965) (Fig. 5.2). The stance duration of the hind limb was plotted against the lateral advanced placement. On the x-axis, the stance duration of the hind limb indicates if the gait is classified as walking (no suspension phase) or running (two suspension phases per stride in the symmetric gaits). On the y-axis, the lateral advanced placement quantifies the phase lag of the lateral fore and hind limbs. The two-beat gaits are at the top and bottom of the diagram, with the four-beat gaits between them. A similar diagram has been proposed for illustrating and comparing the diagonal gaits by plotting the hind stance phase duration against the diagonal advanced placement (Clayton, 1997). • A group of methods describe the type of coupling between the four limbs. All the running gaits can be modeled using the relative phases of the limb cycle (Alexander, 1984) (Fig. 5.1C). However, this diagram describes only the footfalls sequence but does not give any linear or temporal characteristics of the stride. A more sophisticated method based on a series of coupled oscillators has been proposed to describe and simulate both symmetric and asymmetric gaits (Collins & Stewart, 1993). This model has the advantage of being able to describe gait transitions and abnormal gaits like the aubin, in which the hind limbs trot while the forelimbs gallop, and traquenard, in which the hind limbs gallop while the forelimbs trot. The model consists of four coupled oscillators that simulate the cyclical patterns of the four limb movements. It is possible to generate all types of equine gaits using five ways of coupling the oscillators. This type of functional model can be useful for understanding locomotor control by the central nervous system. Experimental results in neurophysiology demonstrated that the rhythmic activity of the skeletal muscles of each limb comes from the central nervous system (Barbeau & Rossignol, 1987). There are four distinct rhythm generators (CPG) for the two hind limbs and for the two forelimbs (Forssberg et al., 1980a, b). Such a generator has been identified in the lumbar spinal cord of the newborn rat (Cazalets et al., 1996). In horses, the characteristics of these rhythm generators should determine the stride frequency and its variability. Great stability is required in dressage while rapid changes are nessary for jumping or racing horses. The walk is a four-beat gait with large overlap times between stance phases of the limbs and no period of suspension. It is the slowest equine gait but probably one of the more complex gaits because of the variability in the overlap and lag time between limbs. In a lameness examination, the variability in the regularity and symmetry of the stride measured at the walk was higher than at the trot (Barrey & Desbrosse, 1996). In dressage horses, the speed of the walk increased from the collected walk (1.37 m/s) to the extended walk (1.82 m/s) with only a small increase in stride frequency (Clayton, 1995). The speed change was mainly the result of lengthening the stride by increasing the over-tracking distance. Even in highly trained dressage horses, a regular four-beat rhythm of the footfalls was observed in only one of the six horses. For a breeding purposes, the calculation of heritabilities of the gait parameters are interesting in order to know if the measurements of these traits could be useful for genetic selection. Heritability (h2) of a quantitative trait, like a gait parameter, estimates the genetic component vs. non-genetic components (breeding management, nutrition, environment, training), which may influence this quantitative trait. Heritability is expressed as a percentage of the genetic variance against the total variance including all the other effects. Table 5.2 shows the heritabilities obtained in French saddle horses for the walk in hand. Walk heritabilities were rather low (mean heritability, h2 = 0.15) except for vertical activity, longitudinal propulsion and percentage of four-beat walk which were highly heritable (Barrey, 2004). The low heritabilities could be explained because the walk is a complex four-beat gait which can be slightly modified by many factors: rider actions, environment. Icelandic horses, Paso Finos, and certain other gaited breeds exhibit a four-beat symmetric gait in which the footfalls are coordinated as lateral or diagonal couplets (Fig. 5.3) (Nicodemus & Clayton, 2003). Gaits with these characteristics are called toelt, paso, running walk, rack, stepping pace or slow gait. These gaits are comfortable for the rider because the amplitude of the dorsoventral displacement is lower than at the trot, which is a consequence of not having a period of suspension. Furthermore vertical movements of the fore and hind limbs are out of phase, allowing a smoother gait (Biknevicius et al., 2006). The speed ranges between 1.7–2.3 m/s for the toelt and the natural gait transition sequence is walk-toelt-canter (Grasselli et al., 1991). The trot is a two-beat, symmetric, diagonal gait (Fig. 5.4). The variations of the trot of saddle horses are the collected, working, medium and extended trots, with the speed of the gait increasing from collected to extended trot. A positive, hind first diagonal advanced placement has been measured at the collected trot in elite dressage horses (Holmström et al., 1994; Clayton, 1997), with the hind limb contacting the ground about 20–30 ms before the diagonal forelimb. Passage and piaffe are diagonal exercises derived from collected trot. From trot in hand to passage, the speed (−2.18 m/s) and stride length (−1.18 m) are reduced while the stride duration (0.279 s) and diagonal advanced placement (9.7 ms) increase (Holmström et al., 1995). Dressage finalists at the Olympic Games in Barcelona showed differences between the temporal variables of the collected trot, passage and piaffe (Clayton, 1997). The stride duration is longer for piaffe (1.08 s) and passage (1.09 s) than for collected trot (0.84 s), which means that passage and piaffe have a lower stride frequency. For most of the other temporal variables, collected trot and passage were similar to each other except that the suspension phase was short in passage. Fig 5.4 Footfalls sequence recorded at the trot using a pneumatic gait recorder. (A) Horse equipped with pneumatic accelerometers attached to the limbs, saddle and tuber sacrale for measuring temporal gait parameters. The white spot indicates the suspension phase as shown on the figure. (B) Time-related changes in the pressure obtained from the pneumatic accelerometers at the trot (LF, left forelimb; RF, right forelimb; RH, right hind limb; LH, left hind limb). The shaded bars indicate the stance phase durations of each limb. The gaps between the shaded bars are the suspension phases between the diagonal supports. Reproduced from Marey (1873). Heritabilities of the trot parameters have been calculated in French saddle horses using the same method as for the walk (Table 5.2). Most of the trot variables had a moderate to high heritability (mean heritability, h2 = 0.24) (Barrey, 2004). The trot characteristics are very important for dressage ability and should be used for early selection at 2 or 3 years old. Slow stride frequency, high dorsoventral activity and high propulsion acceleration vector and longitudinal activity are the trot characteristics required for performing in dressage. The heritabilities were higher at trot than at walk. Because of the heritabilities of the gait parameters, it was assumed that some of these traits could be genetically selected and contributed to dressage performance. Several breeds have been specifically selected for dressage. In Spain, Andalusian horses have been bred for dressage since the 15th century. The Andalusian horses were used for military work at several royal riding academies in Spain, Italy, France and Austria from the 15th to 18th centuries. According to the international competition results, several German breeds or crossed breeds (Hannoverian, Oldenburger, Westphalian and Dutch Warmblood) are today the best performers. In these studbooks, the dressage ability was the main objective of genetic selection. In France, the French saddle horses were mainly selected for jumping. However, a new breeding program for dressage was set up at the end of the 20th century. It has been shown that specific conformation and gait characteristics in German breeds can explain their higher ability for dressage competition (Barrey et al., 2002). For dressage performance, the trot characteristics and variations are very important because they form the basis of passage and piaffe which should be performed at the top level. According to the FEI rules, the trot should be a two-beat gait with free, active and regular steps; the regularity and elasticity of the steps, and engaged hind quarters, should be the main qualities of the trot. The same cadence and rhythm should be maintained during trot variations. The trot characteristics of the German horses showed good similarities with the FEI rules: a slow stride frequency, high regularity, large dorsoventral displacement and activity, which means elasticity and good propulsion (see Table 5.3). Spanish horses have a shorter stride length, a higher stride frequency and a lower dorsoventral displacement and activity than German horses. Spanish horses exhibited elevated movements (large flexion of carpus and tarsus) rather than extended movements of the limbs. Spanish and German groups have a high propulsion and longitudinal activity, which should be an advantage for collecting the trot to passage and piaffe. The German horses had gait characteristics more adapted for dressage competition and that could already be measured in 3-year-old horses. Table 5.3 Changes in trot variables with the stage of training Values followed by different superscript letters are significantly different (p < 0.05). In harness trotters, the trot is so extended that it can reach a maximum speed of 14.2 m/s with a maximum stride frequency of 2.52 strides/s and a maximum stride length of 5.92 m (Barrey et al., 1995). The diagonal sequence usually changes to a four-beat rhythm due to asynchrony of the impact (and lift-off) of the diagonal limb pairs (Drevemo et al., 1980
Gaits and interlimb coordination
Introduction
Classification and description of gaits
Walk
Other walking gaits
Trot
![]()
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


Gaits and interlimb coordination