It is important to understand the internal and external factors of locomotion. A complete clinical assessment and rehabilitation program depend on an in-depth knowledge of the biomechanics of locomotion. Biomechanics is the study of the mechanics of a biological system and includes kinematic and kinetic principles. Kinematics refers to motion, whereas kinetics involves the forces associated with motion. Locomotion has been compared with a symphony orchestra in that “all parts must blend into a harmonious pattern—from the gentle sway of the head and tail for balance to the coordinated efforts of each limb and muscle to accomplish its special function. Conversely, also like an orchestration, if all movements are not attuned to the whole, a major fault should be evident.”1 Previous biomechanical research has enhanced our understanding of canine locomotion and thus warrants an in-depth description.2 The two primary types of locomotion are gait and nonrepetitive motions. Gait is a series of repetitive motions that include walk, trot, pace, gallop, and swim. Nonrepetitive motions do not occur in sequence and include single events such as jumping, movement initiation, and sitting. Nonrepetitive motions have received some focused research attention and are important to understand for clinical evaluations because forces and structural stresses can be at their greatest levels during these motions. By understanding the dynamics of gait and nonrepetitive motions, clinicians can better diagnose and treat injuries and diseases. The skeletal segments and joints of the quadruped are repetitively accelerated, decelerated, and loaded with various force magnitudes. Depending on the geometry of the articular surface and the tissues surrounding a joint, and the load involved, each joint moves through a specific range of motion. There is a coordinated activation of neuromuscular components to rhythmically act on skeletal segments to produce fluid and symmetric motion about each joint. Neuromuscular components must produce concentric, eccentric, and isometric muscle contractions in a synergistic fashion. These muscle contractions must also be at optimal lines of action to apply forces to skeletal structures for efficient propulsion and force absorption. Skeletal structure position is directly influenced by the neuromuscular system and must maintain optimal joint angles and joint velocities to facilitate locomotion. Any alteration in motion of one joint by external devices, disease, injury, inflammation, or surgery may disrupt the flow and fluidity of locomotion.3 Also, joint motion can be indirectly altered psychologically by stimuli such as pain. All of the aforementioned alterations can be present in any quadruped, such as the dog. The gait describes a particular series of joint, segment, and whole-body movements used for locomotion. The temporospatial dynamics of each gait determine its type such as a swimming stroke,4 walk, trot, pace, or gallop. The temporospatial dynamics of a gait can be influenced by surface properties, surface incline, ground movement (i.e., treadmill), submersion in water, and whether or not the dog is traveling in a linear or curvilinear path. A gait is made up of a series of repeated strides. Within a stride, each limb goes through a step cycle. A step cycle includes a stance phase and a swing phase (Figure 11-1). The stance phase is the period in which the foot is in contact with the ground. The first part of the stance phase occurs when the braking forces take place as a result of surface contact. This is followed by the second part of the stance phase in which there is a period of propulsion. The swing phase is the period in which the foot is in the air. It is divided into three parts. The leg first swings backward as a result of the propulsive action; the muscles then swing it forward for locomotion, and then bring it backward and down as it returns to the ground. Each one of these phases applies different forces on the limb’s bony structure and musculature. Variations in these phases help the clinician when diagnosing lameness. A stride is defined as the cycle of body movements that begins with the contact of one foot and ends when that foot again contacts the ground. There are various forms of gait that are defined by how the body moves during each stride.5,6 Symmetric gaits include the walk, trot, and pace. The trot is a two-beat diagonal gait in which the movements of one stride have the diagonal fore and hind limbs in support followed by the other two limbs in support (Figure 11-2). In this gait, the right side and left side of the body move symmetrically, or the two sides mirror each other. Asymmetric gaits include the rack, gallop or canter. In asymmetric movement the sides move differently. The gallop is the gait typically used by dogs that are running at high speeds.7 It has two support phases and two flight phases in each stride (Figure 11-3). The gallop can have either a right or a left lead. In left-lead dogs the feet contact the surface in a clockwise fashion. The left front leg comes into contact first, followed by the right front foot in the front support phase. The dog then leaves the ground in the front flight phase. The next foot to make contact is the right rear foot, followed by the left rear foot in the rear support phase. The dog then propels forward, leaving the ground a second time in the rear flight phase, after which the sequence is again repeated. A right-lead dog goes through the same sequence but contact is in a counterclockwise rotation. This gait is described as a double suspension-rotary gallop. The canter is slower than the gallop and is a three-beat gait, characterized by a “lead” forelimb, with two limbs moving separately and two as a diagonal pair. The pattern of footfalls with a dog cantering in a left lead is right hind, left hind and right fore together, followed by the left forelimb reaching furthest forward. The opposite series of footfalls would occur when a dog is cantering on the right lead. There is only one flight phase in the canter when all four limbs are off the ground, and it occurs just after the forelimbs leave the ground. The canter, sometimes called a lope, is an endurance gait and is sometimes used by sled dogs. Some of the larger dogs that have a wider body structure, such as the Rottweiler or Saint Bernard, use the canter as their preferred running gait. Little research exists evaluating nonrepetitive motions. Therefore there have been no scientifically accepted definitions of the movements (e.g., jumping and movement initiation). One paper describes jumping8 and another describes movement initiation.9 Understanding these movements is important; for example, movement initiation is the movement that is used to begin all gaits. The forces of nonrepetitive motions are often higher than most normal gaits such as the trot, and it is possible that noncontact injuries may occur during nonrepetitive motions. The motions yield not only high forces but also high rates of force application to musculoskeletal tissues. Nonrepetitive motions generally involve a wide range of joint motion and segmental alignments with high force outputs and impacts. From a clinical standpoint, it is important to understand these movements because they can cause injuries or can be used to reveal injuries that might not be noted on a routine clinical exam involving a trot.
Canine Locomotion Analysis

Locomotion
Gait
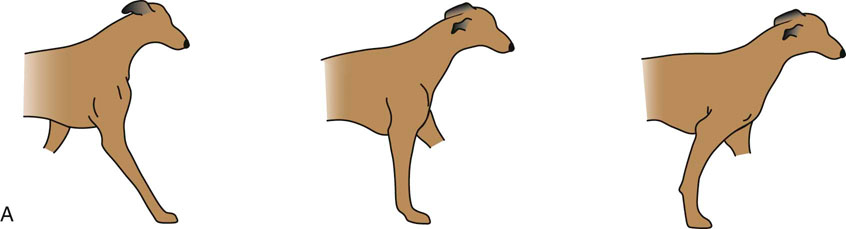
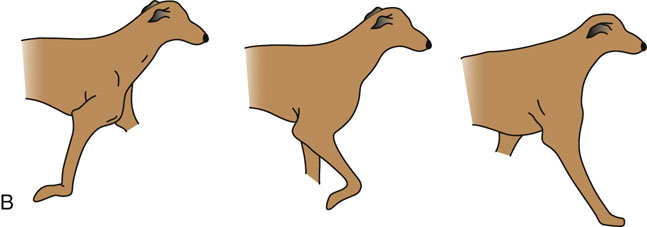
Figure 11-1 A, The stance phase. Braking forces occur at initial impact and continue until the center of gravity transfers over the fulcrum. Propulsive forces predominate for the remainder of the stance phase until the foot leaves the surface. B, The swing phase. Initially the leg swings caudally after the foot leaves the ground. It then swings cranially, until it begins the last caudal swing, which ends when the foot touches the surface.
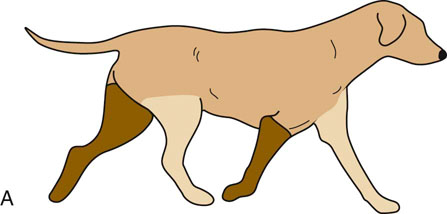
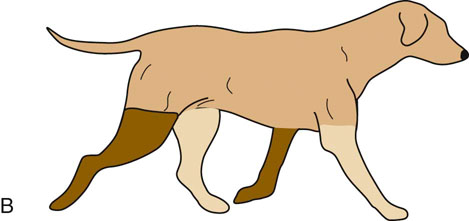
Figure 11-2 The trot. The limbs in light brown are in the stance phase, while the dark brown limbs are in the swing phase.
Nonrepetitive Motions
![]()
Stay updated, free articles. Join our Telegram channel


Full access? Get Clinical Tree


