Fig. 1.
The single pellet reaching task and apparatus dimensions. An animal must walk from the back of the apparatus to the front, sniff to identify the presence of a food pellet in one of the indentations, and then retrieve that pellet with the contralateral hand and bring the food to the mouth for eating.
2.2 Feeding and Food Familiarization
Prior to and during skilled reach training, animals are gradually food restricted to 90–95% of their normal body weight. This is accomplished by feeding 20 g of Purina Rat Chow once in the morning. One week prior to training, rats are familiarized with 45 mg dustless precision banana-flavored pellets (product #F0021) that are the food targets for reaching, before their single morning feeding. Because the banana pellets are a favored food, only a short duration of food deprivation is required to motivate performance.
2.3 Video Recording
Performance during single pellet reaching is video recorded using a camcorder. A wide variety of commercially available camcorders capable of conventional and high-speed recording are available. Filming should be done with at least 1,000th of a second shutter speed to avoid image blurring. The preferred camera position is head on to the reaching box such that the animal’s behavior is filmed from the front, but views from the side, above, or below are useful. A cool fluorescent (Lowel Caselight 4, Brooklyn, NY, USA) studio light source, in addition to the overhead lights of the testing room, provides the illumination necessary for filming. Representative video clips and still frames are captured from digital video recordings with the video-editing software Final Cut Pro (http://www.apple.com) for subsequent archiving and analysis. Pictures can be cropped and adjusted for color and brightness contrast in Adobe Photoshop V.7.0.
2.4 Apparatus Habituation
The aim of the first 10-min training session is to habituate a rat to the reaching box and task. Initially, a rat spends most of its time exploring the box. A number of banana pellets are placed on the reaching tray to promote a rat’s interest. It is acceptable for the rat to start to reach for pellets with the tongue. Once sufficiently interested, pellets may be moved further from the box opening to encourage reaching with the hands. It is important that early in the training process multiple pellets are made available on the tray to encourage reaching and reinforce use of the hands.
2.5 Establishment of Hand Dominance
Once a rat consistently uses the hands to reach for banana pellets, only two banana pellets are presented at a time, one in each indentation in the tray of the reaching box. The animal will likely favor a single hand, which is then reinforced, by baiting the contralateral indentation only. Subsequent reaching sessions promote successful reaching with what is now designated as the dominant hand. Nevertheless, the protocol can be easily modified in order to have an animal use either or both hands.
After each reach, the subsequent food pellet is withheld until the rat walks to the far end of the box. With continued training, a reaching “trial” consists of walking to the front of the box, a reach, and a return to the back of the box. To encourage targeted reaching, the food is periodically withheld on a trial in order to teach the rat to sniff to determine whether food is present before making a reach. Rats use olfaction and not vision to detect the presence of food (9).
Once rats are performing discrete trials and successfully identifying food presence, scoring can begin. Typically, a rat is given 20 trials each day, but the number of trials can be varied depending upon the objectives of the experiment. There are wide individual differences in the success achieved by rats and so the objective of baseline training is to ensure that each rat’s performance is optimal (10).
2.6 Performance Can Be Represented Using End-Point Measures
The utility of skilled reaching behavior is that it can be evaluated by a number of objective measures, including end-point measures of success. The following scoring terminology describes the scores that are applied in order to establish end-point performance on the task.
1.
Trial: A trial consists of the approach of an animal from the rear of the cage to the front slot, the movement of the forelimb into the slot in an attempt to grasp the food, the consumption of the food if successful, and the return to the back of the box.
2.
Reach: A reach is any advance of the hand through the slot.
3.
Hit: A hit is a trial in which the animal grasps the food pellet and brings it to its mouth for eating. In a trial, an animal may make a number of reaches before achieving a hit (or knocking a food pellet off the shelf).
4.
Single-reach-hit : A single-reach-hit (or single-reach-success) is a trial in which the animal makes a single reach movement, successfully grasps the food pellet, and transports it to its mouth.
5.
Miss: A miss is any reach action that fails to grasp the food and transport it to the mouth. The food may be considered a miss if it is ignored, knocked off the shelf, or dropped after being grasped.
Performance can be analyzed in terms of individual animals or groups of animals and can be averaged across the 20 trials of each day’s testing or over multiple days of testing. Figure 2 illustrates end-point measures from a group of rats pretrained to reach and then tested for 25 days following a stroke to the forelimb region of the motor cortex contralateral to the preferred hand. The dotted lines on each graph represent baseline prestroke performance. Figure 2a illustrates total success and it can be seen that the stroke initially impairs total success, but by about 24 days poststroke, animals recover to near baseline performance. Following this, performance deteriorates somewhat with continued training. It is proposed that this decline (*), termed “learned bad use,” signifies a shift in behavior to a “habit” strategy that is less sensitive to the constraints of reinforcement (11). Figure 2b illustrates single reach successes and shows that recovery on this measure is minimal. Figure 2c illustrates total number of reaches and shows that in terms of reach activity there is a marked increase in activity. The change in success and reach number between the first and second day poststroke is interesting. Animals may initially try reaching poststroke and then quit, a behavior termed “learned nonuse.” It is proposed that they need to attempt a reach poststroke in order to learn that they are behaviorally impaired (12). The most important lesson provided by Fig. 2 is that the choice of end-point measure can influence the result obtained (recovery, no recovery, or increased activity). The most accurate profile into the effects of an experimental manipulation can be obtained with multiple end-point measures.
Fig. 2.
End-point measures of skilled reaching behavior (mean ± SEM) before and after forelimb motor cortex stroke. (a) Total number of successes, (b) total number of successes on first reach attempt, and (c) total number of reach attempts. Note: Each end-point measure gives a different view of recovery. On total successes, recovery approaches presurgical performance (dotted line); on first attempt successes, performance remains severely impaired; and on total reach attempts, performance is enhanced in terms of overall limb use over recovery time. Other features of performance include: (1) learned nonuse, in which performance declines from the first postoperative day to the second postoperative day. (2) Restraint induced therapy, in which success increases over the first postoperative week as the rat is forced by food location to use its affected hand. (3) Performance variability at asymptote. (4) Learned baduse in which success declines with continued rehabilitation.
2.7 A Reaching Trial Is Composed of Three Oppositions
A reach is more than the insertion of the forelimb into the slot to grasp a food pellet. It consists of all of the preceding postural adjustments, the support from the triad of nonreaching limbs, and the adjustments of the body associated with bringing the food to the mouth. A reach can be described by all of the body events associated with limb advancement and withdrawal (13). A reaching trial can also be described in terms of three body–pellet relationships or “oppositions” (14). An opposition is a body-to-food target relationship that is independent of variations in an animal’s movement. The three oppositions of a reach are illustrated in Fig. 3 and are defined as follows:
Fig. 3.
Three sequential body-pellet oppositions compose a single skilled reaching act. (a) Photos illustrating the start and end of each opposition; snout-pellet, hand-pellet, and pellet-mouth. (b) Left panel: The proportional duration of each opposition in frames per second. Right panel: Movement trajectory of the snout (orientation), hand (transport), and hand (withdraw) during the performance of each opposition.
1.
Snout-pellet opposition: The first component of a reach is a snout-pellet opposition that is represented by the trajectory of the rat’s snout from the back of the box to the point that it sniffs the food pellet.
2.
Hand-pellet opposition: The second component of a reach is a hand-pellet opposition that is represented by the movement of the animal’s hand from the point of its last step to the point that it grasps the food pellet.
3.
Pellet-mouth opposition: The third component of a reach is a pellet-mouth opposition that is represented by the trajectory of the food held in a rat’s hand to the point that it is grasped by the mouth.
The utility in describing a reach in terms of three oppositions is that oppositions are invariant even while the movements used to achieve each opposition may vary between trials, individual animals, and test sessions. Each opposition can be considered a learned stimulus-response (S-R). The analysis of reach learning and the analysis of recovery of reaching following nervous system injury suggest that reach learning involves both the acquisition of each opposition as well as the acquisition of the sequence of three oppositions. Thus, oppositions are scored across training days such that after successful task acquisition, each trial should consist of the three oppositions performed in order.
2.8 A Reaching Act Is Composed of Four Gestures
A gesture is defined as a single, continuous, nonweight bearing movement of a body part or simultaneous combination of body parts. Gestures may occur smoothly to achieve a single successful reach, but an animal may also introduce pauses between gestures, repeat gestures, or fail to perform a gesture, suggesting that they are discrete components of the reaching act. An analysis of reach learning suggests that an animal must learn to link successive gestures to perform a reaching act. As is illustrated in Fig. 4 and defined below, a successful reach comprises four gestures (11, 15).
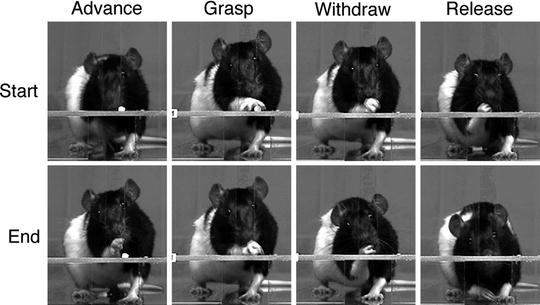
Fig. 4.
Four gestures (nonweight-bearing movements) compose a single skilled reaching act. Photos illustrating the start and end of each gesture; Advance, Grasp, Withdraw, Release.
1.
Advance. The advance gesture begins with the hand lifted from the floor. The forelimb moves through the slot to approach the food.
2.
Grasp. The grasp gesture begins with the hand pronating over the food target and is completed as the digits flex in an attempt to close around the pellet.
3.
Withdraw. The withdraw gesture begins with a movement of the forelimb away from the food location to the mouth.
4.
Release. The release gesture consists of a movement of the hand away from the mouth or the shelf to either the floor or the starting position for the advance.
Table 1 illustrates the scoring procedure for gestures. Note that in a trial a rat may make many different numbers and combinations of gestures on both miss and hit reaches. For a normal rat, the withdraw gesture is very unlikely to occur unless the reach is a hit, but after brain injury to sensory cortex resulting in loss of haptic information from the hand, these gestures may occur on both hit and miss reaches (16).
Table 1
Gesture sheet and exemplar scores
Scenario | Gestures | Total | Outcome | |||
|---|---|---|---|---|---|---|
Advance | Grasp | Withdraw | Release | |||
1 | / | / | / | / | 4 | Hit |
2 | / | / | / | 3 | Miss | |
3 | // | // | / | / | 6 | Hit |
4 | / | // | / | 4 | Miss | |
2.9 A Reaching Act Is Composed of 11 Movement Elements
Movement elements are the individual movements of a limb segment around one or more joints. Figure 5 illustrates the 11 movements comprising a reach, which are derived from a conceptual framework obtained from Eshkol-Wachmann Movement Notation (EWMN) (2). Briefly, EWMN describes the relation, and changes in relation, between the parts of the body. The body is treated as a system of jointed axes (i.e., body and limb segments). A limb is defined as any body part that either lies between two joints or has a joint and a free extremity. These are imagined as straight lines (axes) of constant length which move with one end fixed to the center of a sphere. Using EWMN, the same movements can be notated in several polar coordinate systems. The coordinates of each system are determined in reference to the next proximal or distal limb or body segment, to the animal’s body midline axis, and to the environment. By considering the same behavior in multiple coordinate systems, invariances in that behavior may emerge in some coordinate systems but not others. Thus, the behavior may be invariant in relation to some or all of the following: the animal’s longitudinal axis, gravity, or the next proximal or distal body segment.
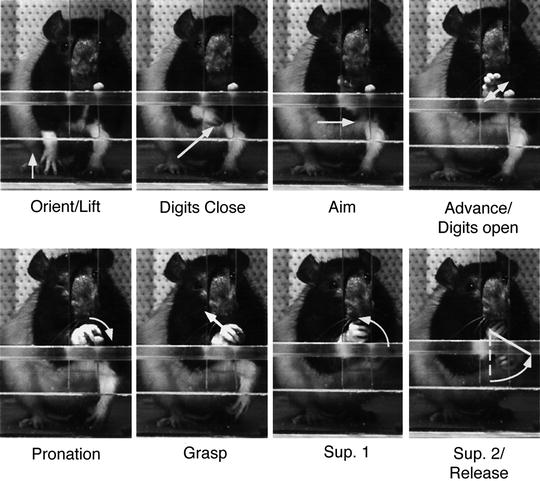
Fig. 5.
Eleven sequential movement elements compose a single skilled reaching act. Photos illustrating each movement element; Orient, Lift, Digits Close, Aim, Advance, Digits Open, Pronation, Grasp, Supination 1, Supination 2, and Release.
The movement elements are difficult to determine directly from the video records because of a pliable fur coat and musculature of the forelimb, which obscure the exact location and movement of skeletal segments. Nevertheless, a close approximation of segmental movements can be made from the video record as has been confirmed by cineradiographic visualization of the skilled reaching act (17). Analysis of the movement elements of successive reaches across both individual and groups of normal rats suggests that the movement is remarkably stable within a rat strain. For this reason, it is typical to score only the first three successful reaches of a test session when scoring the movement elements. The scoring method is illustrated in Table 2, and the movement elements are determined by the following characteristics:
Table 2
Movement element rating scale
Normal | Impaired | Absenta | |
|---|---|---|---|
1. Orient | 0 | 0.5 | 1 |
2. Lift | 0 | 0.5 | 1 |
3. Digits close | 0 | 0.5 | 1 |
4. Aim | 0 | 0.5 | 1 |
5. Advance | 0 | 0.5 | 1 |
6. Digits open | 0 | 0.5 | 1 |
7. Pronation | 0 | 0.5 | 1 |
8. Grasp | 0 | 0.5 | 1 |
9. Supination 1 | 0 | 0.5 | 1 |
10. Supination 2 | 0 | 0.5 | 1 |
11. Release | 0 | 0.5 | 1 |
1.
Orient. The rat locates and fixates on the pellet using the nose and usually completes the movement by sniffing the food.
2.
Lift. The limb is lifted from the floor with the upper arm and the digits are swung to the midline of the body.
3.
Digits close. As the limb is lifted, the hand takes a collected position in which the digits are semiflexed and the hand is supinated so that the palm faces the midline of the body.
4.
Aim. Using the upper arm, the elbow is adducted so that the forearm is aligned along the midline of the body with the hand located just under the mouth. This movement involves fixation of the distal portion of the limb so that the digits remain aligned with the midline of the body. This is likely produced by a movement around the elbow that reverses the direction of movement of the hand to compensate for the adduction of the elbow.
5.
Advance. The head is lifted and the limb is advanced directly forward, above, and beyond the food pellet.
6.




Digits open. As the limb is advanced, the digits are extended and slightly opened.
< div class='tao-gold-member'>
Only gold members can continue reading. Log In or Register to continue
Stay updated, free articles. Join our Telegram channel
Full access? Get Clinical Tree
